Steering Wheel
Recumbent tricycle steering is normally one of four types:
-
Direct steering - essentially a half-handlebar, directly connected to each front wheel pivot, with a bar connecting the wheels to keep the steering angle consistent side-to-side.
-
Yoke steering - a thinner version of bicycle handlebars. Often the bar position is not fixed, so they can be moved out of the way for mounting/dismounting.
-
Underseat Tiller - A bar mounted under the seat is pivoted around a vertical axis to steer. Often the bar ends are vertical to raise the rider’s hands to a comfortable position.
-
Sidestick - A pair of linked, vertical bars are pushed forwards/backwards to pull the steering arms on the wheels. I don’t have an image I can embed, but an example is available here.
 Direct Steering on a Terracycle Cargo Monster
Direct Steering on a Terracycle Cargo Monster
 Yoke control in Pjotr320’s Mango Sport
Yoke control in Pjotr320’s Mango Sport
 Tiller Steering on the Pterosail trike
Tiller Steering on the Pterosail trike
The design of a steering system has to balance two different needs:
-
Steering should be smooth and easy to control around the straight ahead position. So a small movement at high speed should not unsettle the vehicle
-
The steering movement to reach full lock should not be excessively large. A long wheelbase vehicle with a small turning circle must turn the front wheels by a large angle.
The Atomic Duck will use an alternative steering mechanism to those shown above. Taking influences from both bicycles and racing cars, Atomic Duck will use a steering wheel with all the controls mounted on it.
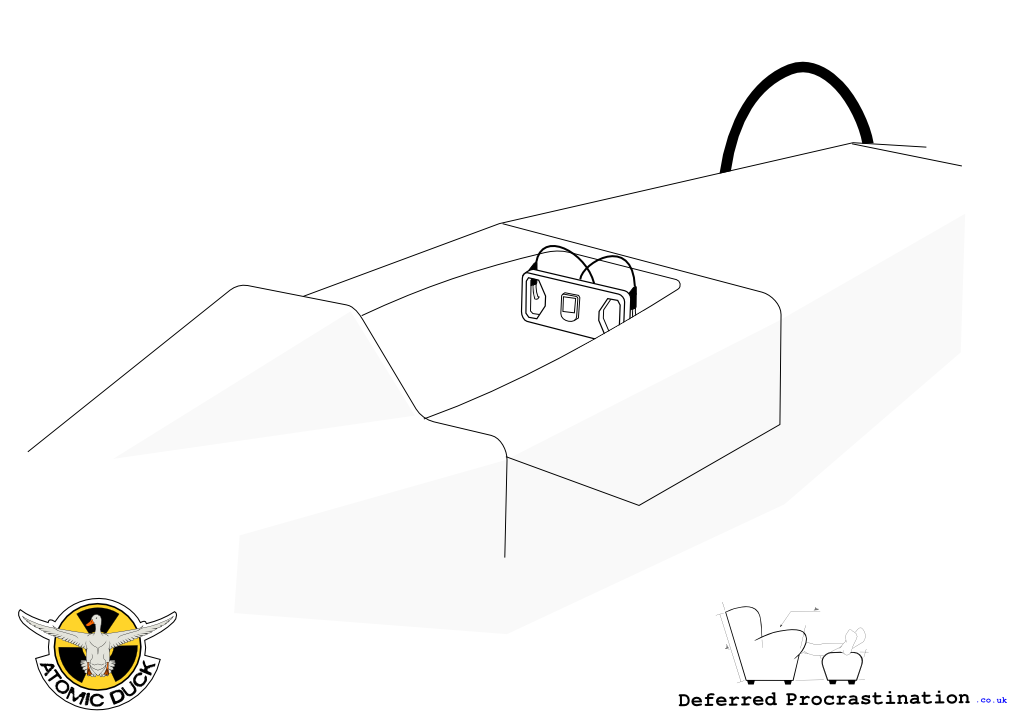 Atomic Duck cockpit concept
Atomic Duck cockpit concept
Using hand controls, with the rider’s fingers resting over the brakes, will be very familiar to every bicycle rider; and a steering wheel should be just as familiar to car drivers. The similarity of the controls to two vehicles that most riders will already be comfortable using means it should take a minimum of time for a new rider feel in control of an Atomic Duck.
The resting, vertical hand position means normal steering motions can use most of a 160-170 degree range of motion, this means that the rider’s hands will never normally leave the brake levers, while still allowing good high speed stability. For tight, very low speed, turning maneuvers; riders can use a greater range of motion and more than a half-turn of the wheel because braking reactions need not be as quick.
The large steering motion allowed by a steering wheel should allow very tight turning circles in the Atomic Duck, despite its long wheelbase. One of the reasons the wheels are so far from the body (see the concept design) is to allow them enough room to move to steer round in very tight circles.
Opus the Poet wrote, “OK so roughly a 1:2 steering ratio? Turn the steering wheel 90 to get 45 degrees of turn at the front wheels? That would solve the sensitivity straight ahead and the turning circle issues. The trick on this one would be getting the ackerman correct with such a large rotation of the steering arm at the center of the vehicle.. But if one used a chain and sprocket to make a poor man's rack and pinion then that would solve the funky motions at the steering arm issues. You would have to either attach the chain to something to make it rigid, like use a drag link under tension with the chain attached to the drag link. Or a sliding block with the chain attached with the Morse cables connected to the sliding block. But if you're going to go to that much trouble you might as well crib a rack from a quad bike and just be done with it.”